
Connecting an Arduino to your car’s OBDII port opens up a world of possibilities for monitoring vehicle data. This article explores how to use an Arduino, an MCP2515 CAN controller, and an OBDII dongle to retrieve data, focusing on the necessary libraries and providing troubleshooting tips for common issues.
The core component for enabling CAN communication with the OBDII port is the MCP2515 CAN controller. This chip allows the Arduino to send and receive messages on the CAN bus, which is the communication protocol used by the OBDII system. To interface with the MCP2515, you’ll need a suitable library. The most common library is the SPI library for SPI communication and a dedicated CAN library like the MCP_CAN library available in the Arduino Library Manager. This library provides functions for initializing the MCP2515, sending and receiving CAN messages, and setting various parameters like the baud rate.
#include <SPI.h>
#include <mcp_can.h>
const int SPI_CS_PIN = 10;
MCP_CAN CAN(SPI_CS_PIN);
void setup() {
Serial.begin(9600);
while (!Serial);
Serial.println("CAN Receiver");
if(CAN_OK == CAN.begin(CAN_500KBPS)) {
Serial.println("CAN BUS Shield init ok!");
} else {
Serial.println("CAN BUS Shield init fail");
Serial.println(" Init CAN BUS Shield again");
while (1);
}
}
void loop() {
unsigned char len = 0;
unsigned char buf[8];
if(CAN_MSGAVAIL == CAN.checkReceive()) {
CAN.readMsgBuf(&len, buf);
unsigned long canId = CAN.getCanId();
Serial.print("ID: ");
Serial.print(canId, HEX);
Serial.print(" Data: ");
for(int i = 0; i<len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
delay(100);
}This revised code incorporates error handling for CAN initialization and utilizes the MCP_CAN library functions for a more robust solution. Remember to install the necessary libraries through the Arduino Library Manager.
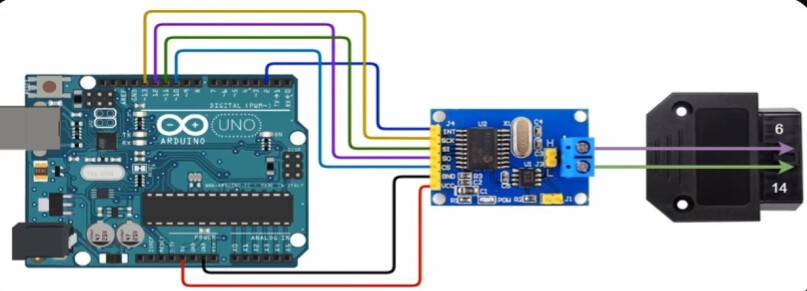
Troubleshooting common issues is crucial. Ensure the OBDII dongle is compatible with the vehicle’s protocol and the Arduino’s voltage levels (typically 5V). Verify the wiring connections between the Arduino, MCP2515, and OBDII dongle.
Common connection issues include incorrect pin mapping or loose connections. Double-check that the CAN High (CANH) and CAN Low (CANL) pins from the OBDII connector are correctly connected to the corresponding pins on the MCP2515.
Testing with a known working CAN device, like an ESP32, can help isolate the problem. If the Arduino receives data from the ESP32 but not the OBDII port, the issue likely lies in the OBDII connection or the vehicle itself.
By understanding the necessary libraries and troubleshooting techniques, you can successfully retrieve data from an OBDII port using an Arduino. Remember to consult the datasheets for your specific hardware and refer to online resources for further assistance.