
Autel Evo 2 Return To Home is a critical safety feature that ensures your drone safely returns to its launch point. Discover the ins and outs of this function and related drone repair solutions with CARDIAGTECH.NET, maximizing your drone’s performance and safeguarding your investment with the best diagnostic tools available. Let’s explore the nuances of the return-to-home failsafe, smart return, and precision landing of your EVO II.
1. Understanding the Autel Evo 2 Return to Home (RTH) Feature
The Autel Evo 2’s Return to Home (RTH) function is a safety mechanism designed to autonomously guide the drone back to its take-off point. This feature is essential for preventing loss or damage to the drone in various scenarios, such as signal loss, low battery, or unexpected events. According to Autel Robotics, the EVO II series is equipped with advanced GPS and GLONASS satellite positioning systems, which enhance the precision and reliability of the RTH function. When activated, the drone ascends to a pre-set altitude, navigates back to the home point, and lands automatically.
1.1. Defining the Automatic Return Function
The automatic return function, often called Return to Home (RTH), is a crucial safety net for drone flights. It enables the drone to autonomously return to its launch point without manual control. This is particularly useful when the drone loses signal, faces low battery, or encounters unforeseen circumstances. As stated by the FAA, “Drones must have a way to safely return to the operator if they lose communication.”
1.2. The Significance of the Take-Off Point
The return-to-home function relies on the drone’s ability to remember the exact GPS coordinates of its take-off location. This location becomes the designated “home point” to which the drone returns when RTH is activated. For best results, ensure a strong GPS signal is acquired before take-off to accurately record the home point.
1.3. Situations That Trigger Automatic Return
Several situations can trigger the automatic return-to-home function:
- Signal Loss: If the drone loses connection with the remote controller, it will initiate RTH after a set period.
- Low Battery: When the battery reaches a critical level, the drone will automatically return to prevent a crash.
- User Activation: Pilots can manually activate RTH through the remote controller or the Autel app.
- Pre-set Failsafe: In the event of specific errors or malfunctions, the drone might initiate RTH as a failsafe measure.
2. Automatic Return vs. Manual Return: What’s the Difference?
The primary difference between automatic and manual return lies in the level of control the pilot has over the drone’s return journey. Automatic return is initiated by the drone itself based on pre-set conditions, while manual return requires the pilot to actively fly the drone back to the home point. Knowing when to use each method is vital for safe and efficient drone operation.
2.1. Automatic Return and Landing Procedures
Automatic return involves the drone autonomously flying back to the home point and landing without pilot intervention. The procedure generally involves:
- Ascending to RTH Altitude: The drone ascends to a pre-set altitude to avoid obstacles.
- Navigation: The drone uses GPS to navigate back to the home point.
- Landing: Upon reaching the home point, the drone descends and lands automatically.
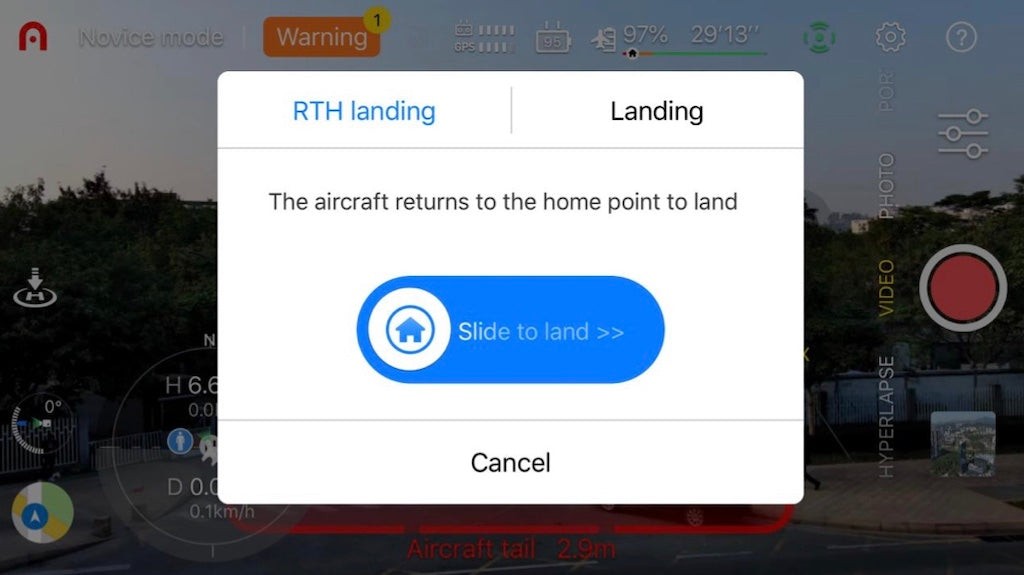
In the Autel drone application, you can trigger an auto return by clicking the “Return” button and selecting “Slide to land.” You can also press and hold the “Home” button on the remote controller.
2.2. Manual Return and Landing Procedures
Manual return requires the pilot to actively control the drone’s flight path and landing. This method is preferred when:
- The pilot wants to avoid obstacles not detected by the drone’s sensors.
- The GPS signal is weak or unreliable.
- The pilot wants to land in a specific location near the home point.
To manually land the drone, use the control sticks to guide it to a safe landing spot and then hold the left joystick down for a few seconds to power off the motors.
2.3. Adjusting Low Battery Alarm Standards
The low battery alarm standard can be adjusted in the settings menu under “Safety” and “Aircraft Battery Information”. Adjusting these settings allows pilots to customize when the drone initiates the automatic return-to-home function, balancing flight time with safety. According to a study by the Association for Unmanned Vehicle Systems International (AUVSI), customizing these parameters can significantly reduce the risk of battery-related incidents.
 Autel EVO Lite Auto Start Auto Landing
Autel EVO Lite Auto Start Auto Landing
3. When Should You Activate the Automatic Return-to-Home Function?
Activating the automatic return-to-home function is crucial in several scenarios to ensure the safety of the drone and its surroundings. These conditions often involve situations where manual control is compromised or the risk of losing the drone is high. Knowing when to rely on this feature can make the difference between a successful flight and a costly mishap.
3.1. Loss of Signal
One of the primary reasons to activate RTH is when the drone loses connection with the remote controller. In such cases, the drone will automatically initiate the return sequence after a pre-set period, preventing it from drifting away or crashing.
3.2. Critical Battery Levels
When the drone’s battery reaches a critical level, activating RTH ensures that the drone has enough power to return safely to the home point. This prevents the drone from running out of battery mid-flight and potentially crashing in an inaccessible location.
3.3. Unforeseen Dangerous Situations
If the drone encounters unexpected dangerous situations, such as sudden weather changes or proximity to restricted airspace, activating RTH can help avoid accidents and ensure compliance with regulations.
3.4. Manual Activation in Emergencies
Pilots can manually activate RTH in emergency situations where they need the drone to return immediately, such as when they lose visual contact with the drone or encounter unexpected obstacles.
4. Is the Drone’s Power Enough to Support Automatic Return?
Ensuring that the drone has sufficient power to complete the return-to-home journey is critical. Autel drones are designed with sophisticated battery management systems that monitor power levels and provide timely alerts. Understanding how these systems work and what actions to take can prevent mid-flight battery failures.
4.1. Understanding Battery Alarm Systems
Autel drones feature battery alarm systems that provide alerts when the battery level drops below a certain threshold. These alarms prompt the pilot to take action, such as initiating RTH or landing the drone immediately. The EVO II series typically sends an alarm when the battery falls below 20%, reminding the pilot to return.
4.2. Optimizing Flight Time
To maximize flight time and ensure sufficient power for RTH, pilots should:
- Fly in optimal weather conditions to reduce power consumption.
- Avoid aggressive maneuvers that drain the battery quickly.
- Monitor the battery level closely and initiate RTH when prompted by the alarm system.
4.3. The Power of Lithium-Ion Batteries in Autel EVO II
The Autel EVO II is equipped with a high-capacity lithium-ion battery that provides up to 40 minutes of flight time. This extended flight time ensures that the drone has ample power to return to the home point, even in challenging conditions. According to Autel Robotics, the advanced battery technology in the EVO II series offers superior energy density and longer lifespan compared to traditional drone batteries.
5. Advantages of Drone Automatic Return: Enhancing Flight Safety and Convenience
The automatic return-to-home function offers numerous advantages, enhancing both the safety and convenience of drone flights. This feature is particularly beneficial for novice pilots or those flying in complex environments where maintaining constant control can be challenging.
5.1. Ensuring Safe Return in Critical Situations
The primary advantage of RTH is its ability to ensure a safe return in critical situations, such as signal loss or low battery. By automatically guiding the drone back to the home point, RTH minimizes the risk of crashes and loss of the drone.
5.2. Facilitating Pilots and Improving Flight Safety
RTH simplifies the flying experience for pilots by providing an automated solution for returning the drone. This is especially useful for new pilots who may not be as proficient at manual control. Additionally, RTH enhances overall flight safety by reducing the likelihood of human error.
5.3. Obstacle Avoidance and Precision Landing
The Autel EVO II is equipped with binocular vision cameras and ultrasonic detectors that generate a detailed depth map of the surrounding environment. This enables the drone to avoid obstacles during the return journey and achieve precise, safe landings. According to a report by Drone Industry Insights, drones with advanced obstacle avoidance systems have significantly lower accident rates.
6. Step-by-Step Guide to Using Autel Evo 2 Return to Home
Using the Autel Evo 2’s Return to Home (RTH) feature is straightforward, but understanding each step ensures a safe and successful return. This guide provides a detailed walkthrough of how to activate and manage the RTH function, whether automatically or manually.
6.1. Pre-Flight Checklist for RTH
Before initiating any flight, ensure the following steps are completed for optimal RTH performance:
- GPS Signal: Confirm the drone has a strong GPS signal (at least 10 satellites) before takeoff.
- Home Point: Verify that the home point is accurately recorded on the Autel app.
- RTH Altitude: Set an appropriate RTH altitude that clears any obstacles in the flight area.
- Battery Level: Check the battery level of both the drone and the remote controller.
6.2. Activating Automatic RTH
Automatic RTH can be triggered in several ways:
- Signal Loss: If the drone loses connection with the remote controller, it will automatically initiate RTH after a pre-set period (usually 3-5 seconds).
- Low Battery: When the battery reaches a critical level, the drone will prompt you to initiate RTH. If no action is taken, it will automatically return.
- Manual Activation: In the Autel Explorer app, tap the RTH icon (usually a “home” symbol) on the screen. Confirm the activation when prompted. Alternatively, press and hold the RTH button on the remote controller until the drone begins its return.
6.3. Activating Manual RTH
To manually activate RTH:
- Check Surroundings: Ensure the area around the drone is clear of obstacles.
- Gain Control: Take control of the drone using the control sticks.
- Fly Towards Home: Guide the drone back towards the home point, using the map on the Autel Explorer app as a reference.
- Land Safely: Once near the home point, carefully descend and land the drone.
6.4. Monitoring the RTH Process
During the RTH process, monitor the drone’s progress on the Autel Explorer app. Pay attention to the following:
- Altitude: Ensure the drone maintains the set RTH altitude to avoid obstacles.
- Battery Level: Keep an eye on the remaining battery to ensure the drone has enough power to complete the return.
- Obstacle Avoidance: Watch for any obstacles the drone may encounter and be prepared to take manual control if necessary.
6.5. Overriding Automatic RTH
In some situations, you may need to override the automatic RTH function. To do this:
- Take Control: Use the control sticks to regain control of the drone.
- Deactivate RTH: Press the RTH button on the remote controller again or tap the “Cancel” button on the Autel Explorer app.
- Fly Manually: Manually fly the drone to a safe location or landing spot.
7. Troubleshooting Common Autel Evo 2 RTH Issues
Even with advanced technology, the Return to Home (RTH) function on the Autel Evo 2 can sometimes encounter issues. Troubleshooting these problems quickly and effectively is crucial for maintaining safe and reliable drone operations.
7.1. RTH Not Activating
Possible Causes:
- Weak GPS Signal: The drone requires a strong GPS signal (at least 10 satellites) to accurately determine its location and the home point.
- Home Point Not Set: If the home point was not properly recorded before takeoff, the drone will not be able to return.
- RTH Disabled: Check the settings in the Autel Explorer app to ensure that the RTH function is enabled.
Troubleshooting Steps:
- Check GPS Signal: Ensure the drone has a strong GPS signal before attempting to activate RTH.
- Verify Home Point: Confirm that the home point is accurately recorded on the Autel Explorer app.
- Enable RTH: Check the settings in the Autel Explorer app to ensure that the RTH function is enabled.
- Restart Drone and Remote: Restart both the drone and the remote controller to refresh the connection.
7.2. Drone Drifting During RTH
Possible Causes:
- Wind Conditions: Strong winds can cause the drone to drift off course during the return journey.
- Compass Interference: Magnetic interference can affect the drone’s compass, causing it to deviate from the correct path.
Troubleshooting Steps:
- Monitor Wind Conditions: Be aware of wind conditions and adjust the RTH altitude accordingly.
- Calibrate Compass: Calibrate the drone’s compass in an open area away from magnetic interference.
- Take Manual Control: If the drone is drifting significantly, take manual control and guide it back to the home point.
7.3. Obstacle Avoidance Issues
Possible Causes:
- Sensor Malfunction: The drone’s obstacle avoidance sensors may malfunction, causing it to collide with obstacles during RTH.
- Poor Lighting Conditions: Obstacle avoidance sensors may not work effectively in low-light conditions.
Troubleshooting Steps:
- Inspect Sensors: Check the drone’s obstacle avoidance sensors for any damage or obstructions.
- Fly in Good Lighting: Avoid flying in low-light conditions where the sensors may not work effectively.
- Update Firmware: Ensure that the drone’s firmware is up to date, as updates often include improvements to obstacle avoidance.
- Take Manual Control: If the drone is struggling to avoid obstacles, take manual control and guide it safely back to the home point.
7.4. Landing Issues
Possible Causes:
- Uneven Surface: The drone may have difficulty landing on uneven surfaces.
- Obstructions: Obstacles in the landing area can prevent the drone from landing safely.
Troubleshooting Steps:
- Choose a Level Landing Spot: Select a level, unobstructed landing spot before initiating RTH.
- Monitor Landing: Watch the drone closely during landing and be prepared to take manual control if necessary.
- Clear Obstructions: Remove any obstructions from the landing area before the drone arrives.
8. Advanced Settings for Autel Evo 2 Return to Home
The Autel Evo 2 offers several advanced settings for the Return to Home (RTH) function, allowing pilots to customize its behavior and optimize it for different flying environments. Understanding and configuring these settings can significantly enhance the safety and reliability of the RTH process.
8.1. Setting the Return to Home Altitude
The RTH altitude is the altitude to which the drone will ascend before returning to the home point. Setting an appropriate RTH altitude is crucial for avoiding obstacles during the return journey.
How to Set the RTH Altitude:
- Open Autel Explorer App: Launch the Autel Explorer app and connect to the drone.
- Go to Settings: Navigate to the settings menu.
- Select RTH Settings: Find the RTH settings.
- Set Altitude: Enter the desired RTH altitude.
Best Practices:
- Assess Environment: Evaluate the height of the tallest obstacles in your typical flying area.
- Set Safe Altitude: Set the RTH altitude at least 15-20 feet above the highest obstacle.
- Consider Regulations: Be aware of any local regulations regarding maximum flying altitudes.
8.2. Adjusting RTH Speed
The RTH speed determines how quickly the drone returns to the home point. Adjusting the RTH speed can help balance the need for a quick return with the desire for a smooth and stable flight.
How to Adjust RTH Speed:
- Open Autel Explorer App: Launch the Autel Explorer app and connect to the drone.
- Go to Settings: Navigate to the settings menu.
- Select RTH Settings: Find the RTH settings.
- Adjust Speed: Adjust the RTH speed to your desired setting.
Best Practices:
- Balance Speed and Stability: A faster RTH speed can get the drone back quickly, but may reduce stability in windy conditions.
- Consider Battery Life: A slower RTH speed can conserve battery life, but may take longer to return the drone.
- Experiment: Test different RTH speeds to find the optimal setting for your flying environment.
8.3. Configuring Failsafe Settings
Failsafe settings determine what the drone will do in the event of a critical failure, such as a loss of signal or a low battery. Configuring these settings can help ensure that the drone returns safely to the home point in emergency situations.
How to Configure Failsafe Settings:
- Open Autel Explorer App: Launch the Autel Explorer app and connect to the drone.
- Go to Settings: Navigate to the settings menu.
- Select Failsafe Settings: Find the failsafe settings.
- Choose Action: Select the desired action (e.g., Return to Home, Land Immediately).
Best Practices:
- Set RTH as Default: Set Return to Home as the default action for most failsafe scenarios.
- Consider Landing Immediately: In some situations, such as a critical motor failure, landing immediately may be the safest option.
- Test Failsafe: Periodically test the failsafe settings to ensure that they are working correctly.
8.4. Using Precision Landing
The Autel Evo 2 is equipped with precision landing capabilities, which allow it to land accurately at the home point. Enabling this feature can help ensure a safe and stable landing.
How to Use Precision Landing:
- Enable Precision Landing: In the Autel Explorer app, enable the precision landing feature.
- Ensure Clear Landing Area: Make sure the landing area is clear of obstacles.
- Monitor Landing: Watch the drone closely during landing to ensure that it lands safely.
Best Practices:
- Choose a Level Surface: Select a level, unobstructed landing surface.
- Avoid Low-Light Conditions: Precision landing may not work effectively in low-light conditions.
- Calibrate Sensors: Calibrate the drone’s sensors regularly to ensure accurate precision landing.
9. Tips for Maintaining a Reliable Autel Evo 2 Return to Home
Maintaining a reliable Return to Home (RTH) function on your Autel Evo 2 involves several best practices, from regular maintenance to smart flying habits. These tips can help ensure that the RTH function works flawlessly when you need it most.
9.1. Regular Firmware Updates
Keeping your Autel Evo 2’s firmware up to date is crucial for maintaining a reliable RTH function. Firmware updates often include improvements to the RTH algorithm, obstacle avoidance, and other critical systems.
How to Update Firmware:
- Check for Updates: Regularly check the Autel Explorer app for firmware updates.
- Download Updates: Download any available updates to your mobile device.
- Connect Drone: Connect your mobile device to the drone and follow the on-screen instructions to install the update.
Best Practices:
- Update Regularly: Check for firmware updates at least once a month.
- Read Release Notes: Read the release notes for each update to understand the changes and improvements.
- Backup Settings: Before updating, back up your drone’s settings in case something goes wrong.
9.2. Calibrating Sensors Regularly
The Autel Evo 2 relies on a variety of sensors, including GPS, compass, and obstacle avoidance sensors, to perform the RTH function. Calibrating these sensors regularly can help ensure that they are accurate and reliable.
How to Calibrate Sensors:
- Open Autel Explorer App: Launch the Autel Explorer app and connect to the drone.
- Go to Settings: Navigate to the settings menu.
- Select Calibration: Find the calibration options.
- Follow Instructions: Follow the on-screen instructions to calibrate each sensor.
Best Practices:
- Calibrate Before Each Flight: Calibrate the compass before each flight, especially if you are flying in a new location.
- Calibrate After a Crash: Calibrate all sensors after a crash or hard landing.
- Avoid Interference: Calibrate sensors in an open area away from magnetic interference.
9.3. Smart Flying Habits
Adopting smart flying habits can help prevent situations where the RTH function is needed, and ensure that it works effectively if it is activated.
Smart Flying Habits:
- Maintain Visual Line of Sight: Always maintain visual line of sight with the drone to prevent signal loss.
- Fly in Good Weather: Avoid flying in strong winds, rain, or other adverse weather conditions.
- Monitor Battery Levels: Keep a close eye on the drone’s battery level and initiate RTH before the battery gets too low.
- Set Appropriate RTH Altitude: Set the RTH altitude high enough to clear any obstacles in your flying area.
- Plan Your Flights: Plan your flights in advance and be aware of any potential hazards in the area.
9.4. Regular Maintenance
Regular maintenance can help keep your Autel Evo 2 in top condition and ensure that all systems, including the RTH function, are working properly.
Regular Maintenance Tasks:
- Inspect Drone: Regularly inspect the drone for any signs of damage or wear.
- Clean Drone: Clean the drone regularly to remove dirt, dust, and debris.
- Check Propellers: Check the propellers for any cracks or damage and replace them if necessary.
- Check Battery: Check the battery for any signs of swelling or damage and replace it if necessary.
By following these tips, you can help ensure that your Autel Evo 2’s Return to Home function remains reliable and effective, providing you with peace of mind during every flight.
10. The Future of Drone Safety: Enhancements to the Return to Home Feature
The Return to Home (RTH) feature is a cornerstone of drone safety, and ongoing advancements promise to make it even more reliable and effective in the future. These enhancements focus on improving obstacle avoidance, precision landing, and overall system resilience.
10.1. Improved Obstacle Avoidance
Future RTH systems will incorporate more sophisticated obstacle avoidance technologies, such as:
- 360-Degree Sensing: Drones will be equipped with sensors that provide a complete view of the surrounding environment, allowing them to detect and avoid obstacles in all directions.
- AI-Powered Obstacle Recognition: Artificial intelligence (AI) will be used to analyze sensor data and identify potential obstacles, even in complex environments.
- Real-Time Mapping: Drones will create real-time maps of their surroundings, allowing them to navigate around obstacles more effectively.
These improvements will reduce the risk of collisions during the RTH process, especially in cluttered environments.
10.2. Enhanced Precision Landing
Future RTH systems will also feature enhanced precision landing capabilities, including:
- Visual Landing Markers: Drones will be able to recognize visual landing markers, such as QR codes or designated landing pads, and use them to land accurately.
- Terrain Analysis: Drones will analyze the terrain beneath them to identify the safest and most stable landing spot.
- Automated Adjustments: Drones will automatically adjust their position and orientation to compensate for wind, slope, and other factors.
These enhancements will ensure that drones land safely and securely, even in challenging conditions.
10.3. Greater System Resilience
Future RTH systems will be designed to be more resilient to failures and disruptions, including:
- Redundant Sensors: Drones will be equipped with redundant sensors, so that if one sensor fails, another can take its place.
- Backup Communication Systems: Drones will have backup communication systems, so that if the primary communication link is lost, they can still return to the home point.
- Emergency Landing Protocols: Drones will have emergency landing protocols that can be activated in the event of a critical failure.
These improvements will ensure that the RTH function remains reliable, even in the face of unexpected challenges.
10.4. Integration with Air Traffic Management Systems
As drone technology continues to evolve, RTH systems will increasingly be integrated with air traffic management (ATM) systems. This integration will allow drones to:
- Share Location Data: Drones will share their location data with ATM systems, allowing air traffic controllers to track their movements and ensure that they are operating safely.
- Receive Real-Time Updates: Drones will receive real-time updates on airspace restrictions, weather conditions, and other potential hazards.
- Coordinate with Other Aircraft: Drones will be able to coordinate their movements with other aircraft, avoiding collisions and ensuring safe operations.
This integration will help to create a safer and more efficient airspace for all users.
11. Conclusion: Mastering the Autel Evo 2 Return to Home for Safe Flights
The Return to Home (RTH) function on the Autel Evo 2 is a critical safety feature that can help prevent accidents and ensure that your drone returns safely in various situations. By understanding how the RTH function works, how to configure it properly, and how to troubleshoot common issues, you can maximize its effectiveness and enjoy peace of mind during every flight.
11.1. The Importance of Understanding RTH
Understanding the Return to Home (RTH) feature is paramount for every drone pilot. It’s not just about knowing the button to press; it’s about comprehending the conditions under which RTH activates, the drone’s behavior during the process, and how to intervene if necessary. A thorough understanding of RTH can be the difference between a safe return and a potential loss.
11.2. Configuring Settings for Optimal Performance
Configuring the settings for optimal performance involves more than just setting an RTH altitude. It requires a careful assessment of your typical flying environment, understanding the capabilities of your drone, and tailoring the settings to match your specific needs. Regular adjustments based on changing conditions can further enhance the effectiveness of the RTH function.
11.3. Regular Maintenance and Smart Flying Habits
Regular maintenance and smart flying habits are the cornerstones of drone safety. Simple tasks like inspecting propellers, calibrating sensors, and keeping firmware up-to-date can significantly reduce the risk of accidents. Similarly, adopting smart flying habits, such as maintaining visual line of sight and avoiding adverse weather conditions, can prevent situations where RTH is needed in the first place.
11.4. Staying Informed About Future Enhancements
Staying informed about future enhancements to the RTH feature is essential for every drone pilot. As technology continues to evolve, new features and capabilities will emerge that can further improve the safety and reliability of drone flights. By staying abreast of these developments, you can ensure that you are always using the latest and most effective tools to protect your drone and the people around you.
For those looking to maintain and optimize their Autel Evo 2 drones, CARDIAGTECH.NET offers a comprehensive range of diagnostic tools and equipment. Ensure your drone’s safety and longevity by investing in high-quality repair solutions. Contact us today to learn more about our offerings and how we can assist you in keeping your drone in top condition.
Contact Information:
- Address: 276 Reock St, City of Orange, NJ 07050, United States
- WhatsApp: +1 (641) 206-8880
- Website: CARDIAGTECH.NET
Frequently Asked Questions (FAQ) About Autel Evo 2 Return to Home
Here are some frequently asked questions about the Autel Evo 2 Return to Home (RTH) feature:
-
What is the Autel Evo 2 Return to Home (RTH) function?
The RTH function is a safety feature that automatically returns the drone to its takeoff point if it loses signal, has low battery, or encounters other issues. -
How do I activate the RTH function on my Autel Evo 2?
You can activate RTH by pressing the RTH button on the remote controller or through the Autel Explorer app. -
What happens if my drone loses signal during flight?
If the drone loses signal, it will automatically initiate the RTH function and return to its takeoff point. -
Can I manually control the drone during the RTH process?
Yes, you can override the RTH function and take manual control of the drone at any time. -
What is the recommended RTH altitude for my Autel Evo 2?
The recommended RTH altitude is at least 15-20 feet above the tallest obstacle in your flying area. -
How do I set the RTH altitude on my Autel Evo 2?
You can set the RTH altitude through the Autel Explorer app in the settings menu. -
What should I do if my drone is drifting during the RTH process?
If the drone is drifting, take manual control and guide it back to the correct path. -
What are the potential causes of RTH failure on my Autel Evo 2?
Potential causes include weak GPS signal, compass interference, and sensor malfunction. -
How often should I calibrate the sensors on my Autel Evo 2?
You should calibrate the sensors before each flight, especially if you are flying in a new location. -
Where can I find more information about the Autel Evo 2 RTH function?
You can find more information in the Autel Evo 2 user manual or on the Autel Robotics website.
By mastering the Autel Evo 2 Return to Home function and following these guidelines, you can ensure safer, more enjoyable drone flights. Remember to always prioritize safety and stay informed about the latest drone technology and best practices.